








Our goal is to understand the principles of Perception, Action and Learning in autonomous systems that successfully interact with complex environments and to use this understanding to design future artificially intelligent systems. The Institute studies these principles in biological, computational, hybrid, and material systems ranging from nano to macro scales. We take a highly interdisciplinary approach that combines mathematics, computation, materials science, and biology.
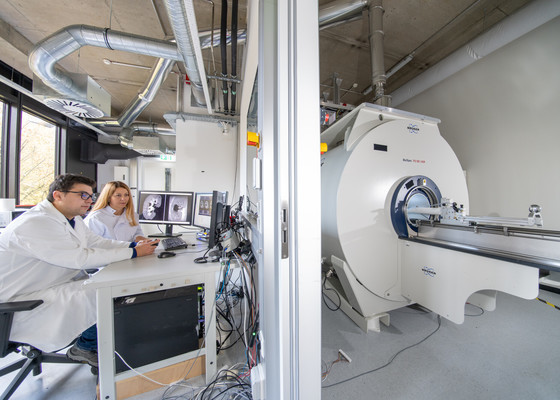


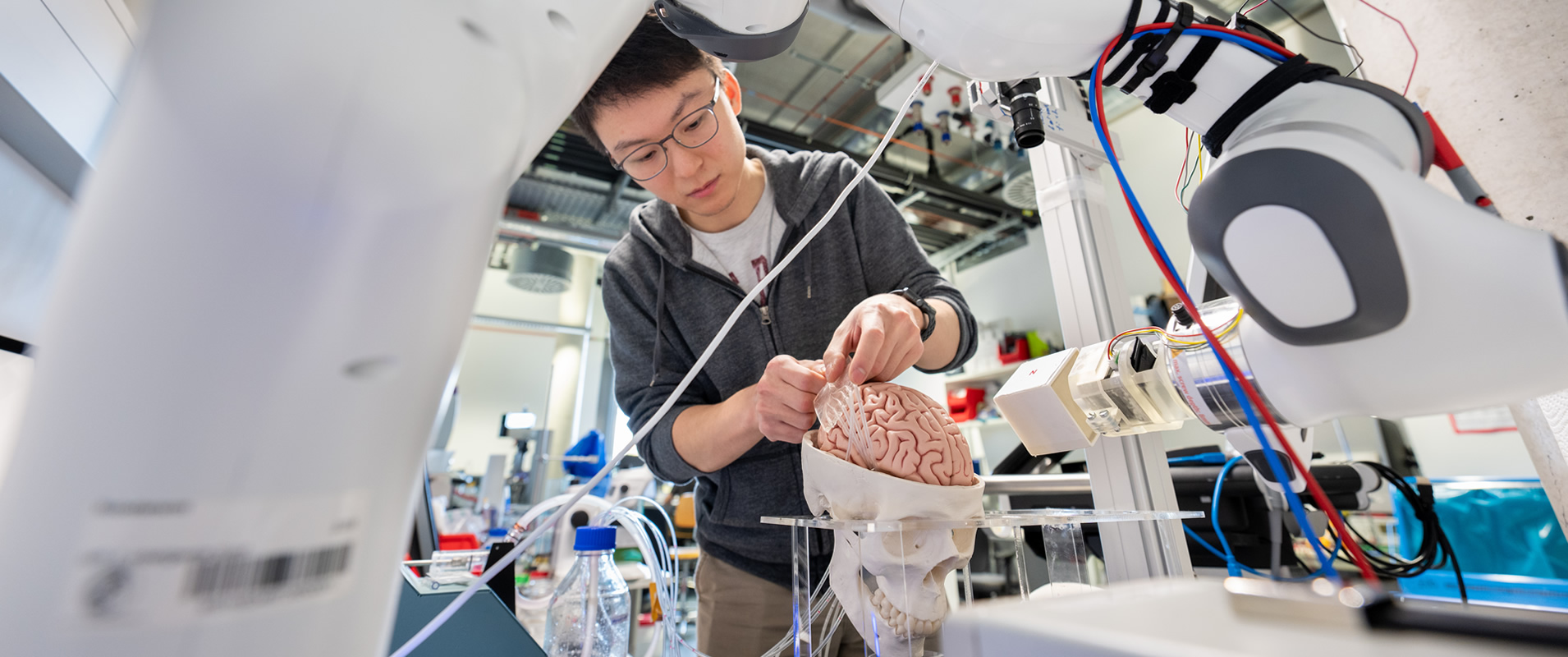
The Max Planck Institute for Intelligent Systems has campuses in Stuttgart and Tübingen. The institute combines – within one center – theory, software, and hardware expertise in the research field of intelligent systems. The Tübingen campus focuses on how intelligent systems process information to perceive, act and learn through research in the areas of machine learning, computer vision, and human-scale robotics. Our Stuttgart campus has world-leading expertise in micro- and nano-robotic systems, haptic perception, human-robot interaction, robotic materials,, bio-hybrid systems, and medical robotics.





The Max Planck Institute for Intelligent Systems currently houses multiple Research Groups, all of which are lead by outstanding scientists who receive a secure budget. This freedom helps them propel their research and lay the foundations for a successful scientific career.
