Virtual pivot point in human walking: always experimentally observed but simulations suggest it may not be necessary for stability
2023
Article
dlg
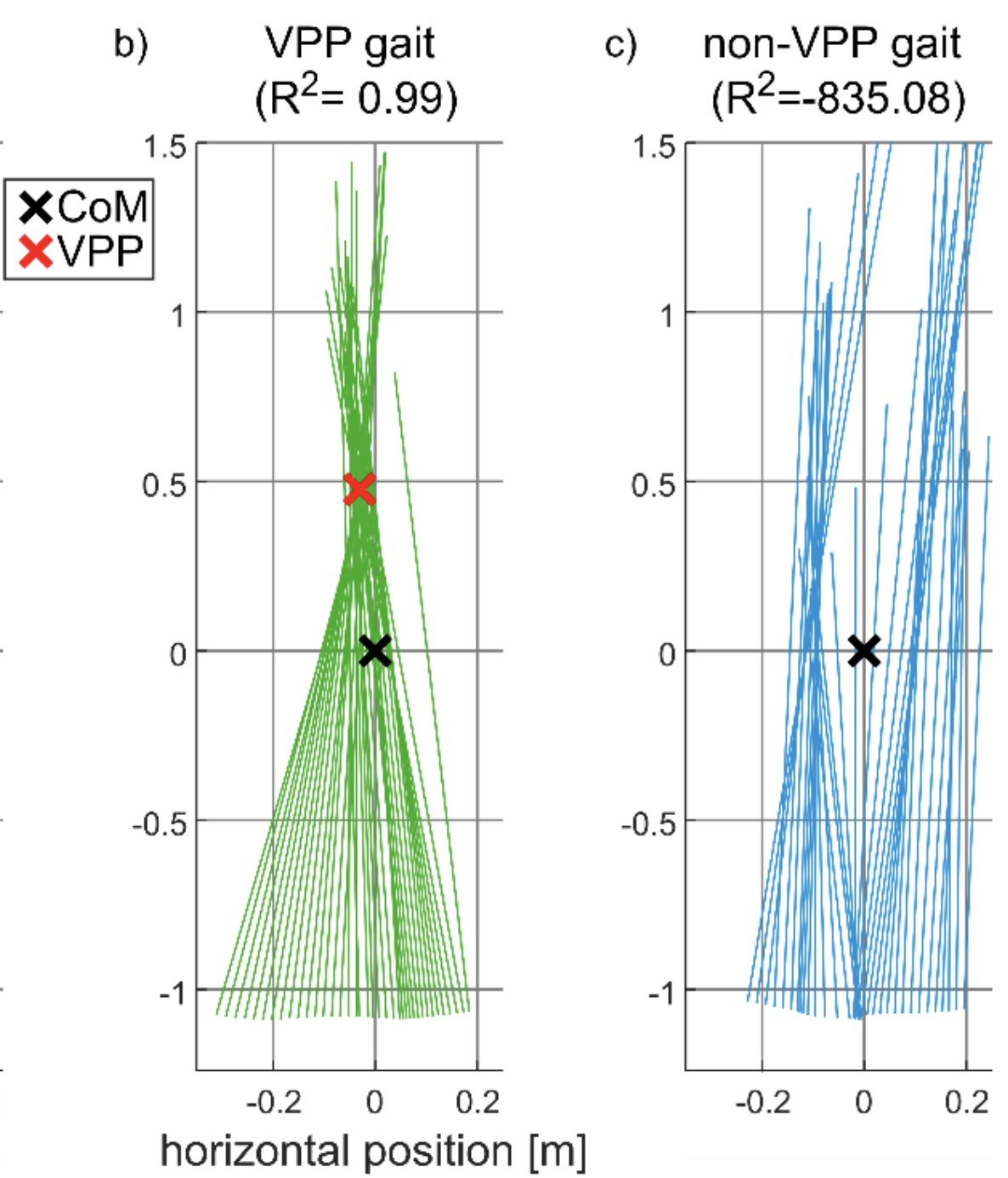
The intersection of ground reaction forces near a point above the center of mass has been observed in computer simulation models and human walking experiments. Observed so ubiquitously, the intersection point (IP) is commonly assumed to provide postural stability for bipedal walking. In this study, we challenge this assumption by questioning if walking without an IP is possible. Deriving gaits with a neuromuscular reflex model through multi-stage optimization, we found stable walking patterns that show no signs of the IP-typical intersection of ground reaction forces. The non-IP gaits found are stable and successfully rejected step-down perturbations, which indicates that an IP is not necessary for locomotion robustness or postural stability. A collision-based analysis shows that non-IP gaits feature center of mass (CoM) dynamics with vectors of the CoM velocity and ground reaction force increasingly opposing each other, indicating an increased mechanical cost of transport. Although our computer simulation results have yet to be confirmed through experimental studies, they already indicate that the role of the IP in postural stability should be further investigated. Moreover, our observations on the CoM dynamics and gait efficiency suggest that the IP may have an alternative or additional function that should be considered.
| Author(s): | Lucas Schreff and Daniel F. B. Haeufle and Alexander Badri-Spröwitz and Johanna Vielemeyer and Roy Müller |
| Journal: | Journal of Biomechanics |
| Volume: | 153 |
| Year: | 2023 |
| Month: | May |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1016/j.jbiomech.2023.111605 |
| State: | Published |
| URL: | https://doi.org/10.48550/arXiv.2212.10074 |
| Links: |
arXiv
|
|
BibTex @article{dlg-vp-2023,
title = {Virtual pivot point in human walking: always experimentally observed but simulations suggest it may not be necessary for stability},
author = {Schreff, Lucas and Haeufle, Daniel F. B. and Badri-Spr{\"o}witz, Alexander and Vielemeyer, Johanna and M{\"u}ller, Roy},
journal = {Journal of Biomechanics},
volume = {153},
month = may,
year = {2023},
doi = {10.1016/j.jbiomech.2023.111605},
url = {https://doi.org/10.48550/arXiv.2212.10074},
month_numeric = {5}
}
|
|