Roombots: A hardware perspective on 3D self-reconfiguration and locomotion with a homogeneous modular robot
2014
Article
dlg
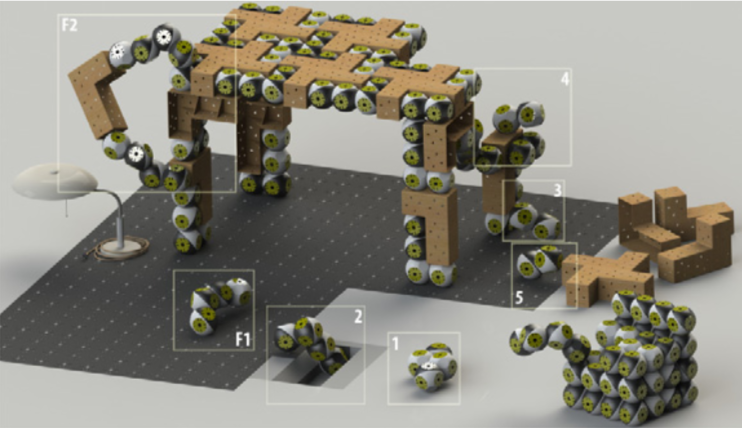
In this work we provide hands-on experience on designing and testing a self-reconfiguring modular robotic system, Roombots (RB), to be used among others for adaptive furniture. In the long term, we envision that RB can be used to create sets of furniture, such as stools, chairs and tables that can move in their environment and that change shape and functionality during the day. In this article, we present the first, incremental results towards that long term vision. We demonstrate locomotion and reconfiguration of single and metamodule RB over 3D surfaces, in a structured environment equipped with embedded connection ports. RB assemblies can move around in non-structured environments, by using rotational or wheel-like locomotion. We show a proof of concept for transferring a Roombots metamodule (two in-series coupled RB modules) from the non-structured environment back into the structured grid, by aligning the RB metamodule in an entrapment mechanism. Finally, we analyze the remaining challenges to master the full Roombots scenario, and discuss the impact on future Roombots hardware.
| Author(s): | Spröwitz, Alexander and Moeckel, Rico and Vespignani, Massimo and Bonardi, Stéphane and Ijspeert, Auke Jan |
| Journal: | {Robotics and Autonomous Systems} |
| Volume: | 62 |
| Number (issue): | 7 |
| Pages: | 1016--1033 |
| Year: | 2014 |
| Publisher: | Elsevier |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Article (article) |
| Address: | Amsterdam |
| DOI: | 10.1016/j.robot.2013.08.011 |
|
BibTex @article{escidoc:2310487,
title = {Roombots: A hardware perspective on 3D self-reconfiguration and locomotion with a homogeneous modular robot},
author = {Spr{\"o}witz, Alexander and Moeckel, Rico and Vespignani, Massimo and Bonardi, St\'ephane and Ijspeert, Auke Jan},
journal = {{Robotics and Autonomous Systems}},
volume = {62},
number = {7},
pages = {1016--1033},
publisher = {Elsevier},
address = {Amsterdam},
year = {2014},
doi = {10.1016/j.robot.2013.08.011}
}
|
|