Seeking Causal, Invariant, Structures with Kernel Mean Embeddings in Haptic-Auditory Data from Tool-Surface Interaction
2023
Miscellaneous
hi
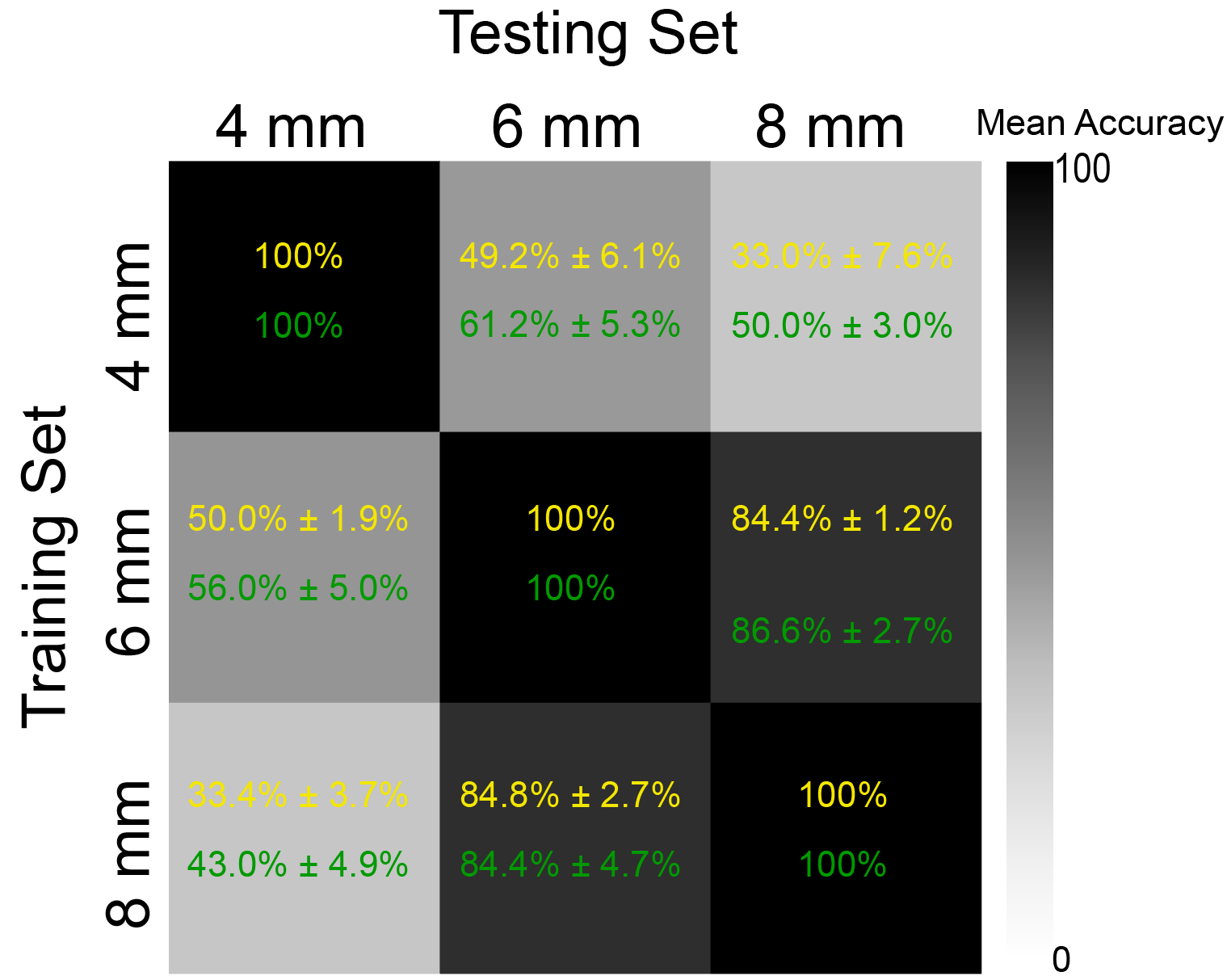
Causal inference could give future learning robots strong generalization and scalability capabilities, which are crucial for safety, fault diagnosis and error prevention. One application area of interest consists of the haptic recognition of surfaces. We seek to understand cause and effect during physical surface interaction by examining surface and tool identity, their interplay, and other contact-irrelevant factors. To work toward elucidating the mechanism of surface encoding, we attempt to recognize surfaces from haptic-auditory data captured by previously unseen hemispherical steel tools that differ from the recording tool in diameter and mass. In this context, we leverage ideas from kernel methods to quantify surface similarity through descriptive differences in signal distributions. We find that the effect of the tool is significantly present in higher-order statistical moments of contact data: aligning the means of the distributions being compared somewhat improves recognition but does not fully separate tool identity from surface identity. Our findings shed light on salient aspects of haptic-auditory data from tool-surface interaction and highlight the challenges involved in generalizing artificial surface discrimination capabilities.
| Author(s): | Behnam Khojasteh and Yitian Shao and Katherine J. Kuchenbecker |
| Year: | 2023 |
| Month: | October |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Surface Interactions as Probability Distributions in Embedding Spaces
|
| Bibtex Type: | Miscellaneous (misc) |
| Paper Type: | Workshop |
| Address: | Detroit, USA |
| How Published: | Workshop paper (4 pages) presented at the IROS Workshop on Causality for Robotics: Answering the Question of Why |
| State: | Published |
| Attachments: |
Manuscript
|
|
BibTex @misc{Khojasteh23-IROSWS-Seeking,
title = {Seeking Causal, Invariant, Structures with Kernel Mean Embeddings in Haptic-Auditory Data from Tool-Surface Interaction},
author = {Khojasteh, Behnam and Shao, Yitian and Kuchenbecker, Katherine J.},
howpublished = {Workshop paper (4 pages) presented at the IROS Workshop on Causality for Robotics: Answering the Question of Why},
address = {Detroit, USA},
month = oct,
year = {2023},
doi = {},
month_numeric = {10}
}
|
|