
2023
ei
Kofler, A.
Efficient Sampling from Differentiable Matrix Elements
Technical University of Munich, Germany, September 2023 (mastersthesis)
ei
Spieler, A. M.
Intrinsic complexity and mechanisms of expressivity of cortical neurons
University of Tübingen, Germany, March 2023 (mastersthesis)
ei
Qui, Z.
Towards Generative Machine Teaching
Technical University of Munich, Germany, February 2023 (mastersthesis)
ei
Dittrich, A.
Generation and Quantification of Spin in Robot Table Tennis
University of Stuttgart, Germany, January 2023 (mastersthesis)
ei
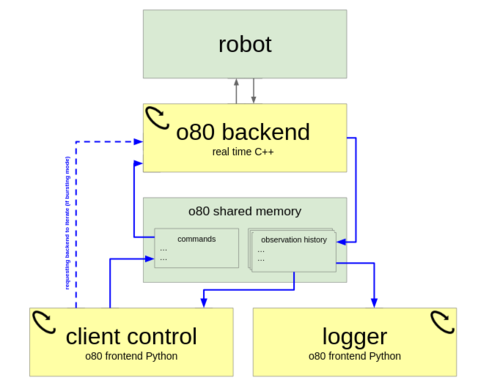
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
ev
Elich, C., Kirchdorfer, L., Köhler, J. M., Schott, L.
Challenging Common Assumptions in Multi-task Learning
abs/2311.04698, CoRR/arxiv, 2023 (techreport)
2022
ei
Liang, W.
Investigating Independent Mechanisms in Neural Networks
Université Paris-Saclay, France, October 2022 (mastersthesis)
ei
Keidar, D.
Modeling subgroup differences in fMRI data: disentangling subgroup-specific responses from shared ones
ETH Zurich, Switzerland, October 2022 (mastersthesis)
ei
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
ei
Feil, M.
Multi-Target Multi-Object Manipulation using Relational Deep Reinforcement Learning
Technnical University Munich, Germany, September 2022 (mastersthesis)
ei
Sliwa, J.
Independent Mechanism Analysis for High Dimensions
University of Tübingen, Germany, September 2022, (Graduate Training Centre of Neuroscience) (mastersthesis)
ei
Dominguez-Olmedo, R.
On the Adversarial Robustness of Causal Algorithmic Recourse
University of Tübingen, Germany, August 2022 (mastersthesis)
ei
Ghosh, S.
Independent Mechanism Analysis in High-Dimensional Observation Spaces
ETH Zurich, Switzerland, June 2022 (mastersthesis)
dlg
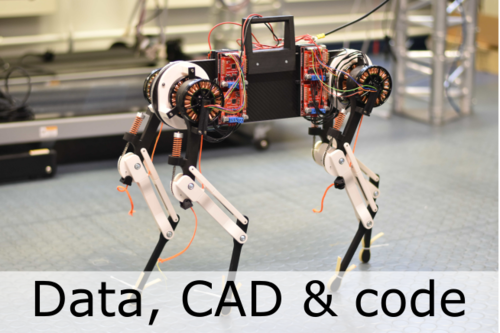
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
dlg
pi
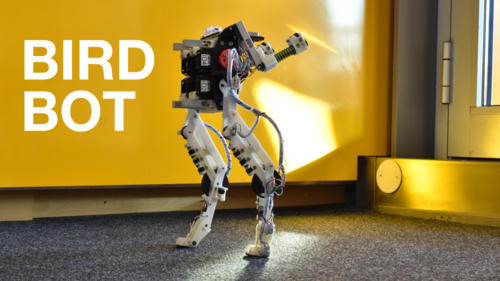
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
mms
Miller, M.
Voltage dependent investigations on the spin polarization of layered heterostructues
Universität Stuttgart, Stuttgart, 2022 (mastersthesis)
2021
ei
Scherrer, N.
Learning Neural Causal Models with Active Interventions
ETH Zurich, Switzerland, November 2021 (mastersthesis)
ei
Bing, S.
HealthGen: Conditional Generation of Realistic Medical Time Series with Informative Missingness
ETH Zurich, Switzerland, October 2021 (mastersthesis)
ei
Lanzillotta, G.
Study of the Interventional Consistency of Autoencoders
ETH Zurich, Switzerland, October 2021 (mastersthesis)
ev
Strecke, M., Stückler, J.
Physically Plausible Tracking & Reconstruction of Dynamic Objects
KIT Science Week Scientific Conference & DGR-Days 2021, October 2021 (talk)
ei
Mambelli, D.
Training with Few to Manipulate Many. On OOD generalization in relational reinforcement learning
ETH Zurich, Switzerland, October 2021 (mastersthesis)
re
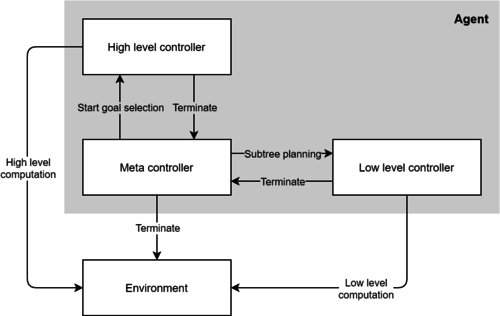
Heindrich, L., Consul, S., Stojcheski, J., Lieder, F.
Improving Human Decision-Making by Discovering Efficient Strategies for Hierarchical Planning
Tübingen, Germany, The first edition of Life Improvement Science Conference, June 2021 (talk) Accepted
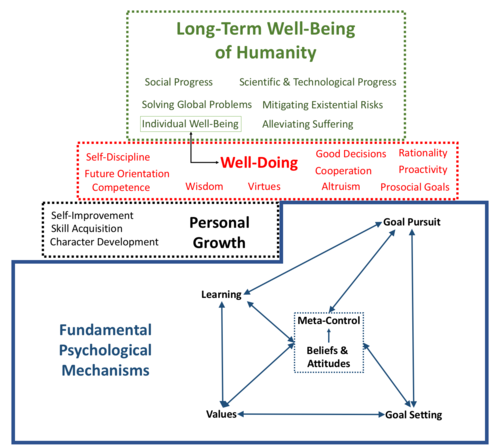
re
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
hi
Krauthausen, F.
Robotic Surgery Training in AR: Multimodal Record and Replay
pages: 1-147, University of Stuttgart, Stuttgart, May 2021, Study Program in Software Engineering (mastersthesis)
mms
Alten, F.
Direct detection of spin Hall effect induced torques in platinum/ferromagnetic bilayer systems
Universität Stuttgart, Stuttgart, January 2021 (mastersthesis)
pi
Sitti, M., Liimatainen, V.
Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
2021, EP Prio. Patent App. 21 162 253.5 (mpi_year_book)
pio
Zottino, N.
Community detection in heterogeneously attributed networks
Politecnico di Torino, 2021 (mastersthesis)
2020
mms
Sauter, R.
Hydromagnonics: Manipulation of magnonic systems with hydrogen
Universität Stuttgart, Stuttgart, December 2020 (mastersthesis)
ei
Ahmed, O.
A Robotic Manipulation Benchmark for Causal Structure and Transfer Learning
ETH Zurich, Switzerland, October 2020 (mastersthesis)
ei
DuMont Schütte, A.
A Comprehensive Benchmark Evaluation of Synthetic Data Generation for Biomedical Imaging
ETH Zurich, Switzerland, October 2020 (mastersthesis)
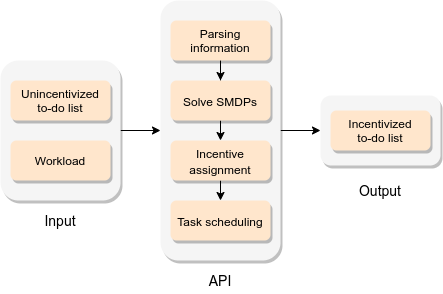
re
Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification
ArXiv Preprint, 2020 (techreport)
ei
Cacioppo, A.
Deep learning for the parameter estimation of tight-binding Hamiltonians
University of Roma, La Sapienza, Italy, May 2020 (mastersthesis)
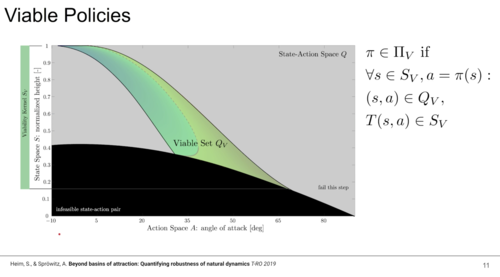
dlg
Heim, S., Badri-Spröwitz, A.
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
May 2020 (talk)
ei
Zecevic, M.
Learning Algorithms, Invariances, and the Real World
Technical University of Darmstadt, Germany, April 2020 (mastersthesis)
mms
Bondorf, L.
Interaction of hydrogen isotopes with flexible metal-organic frameworks
Universität Stuttgart, Stuttgart, February 2020 (mastersthesis)
pio
Lonardi, A.
Developing new methods for routing and optimal transport on networks
Università degli studi di Padova, 2020 (mastersthesis)
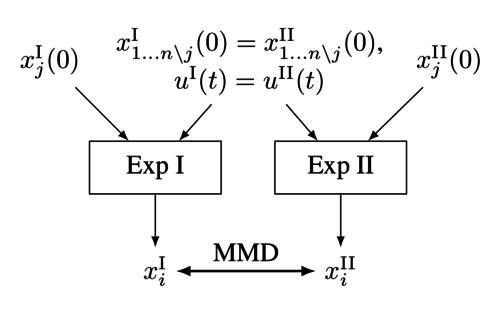
ics
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
Identifying Causal Structure in Dynamical Systems
2020 (techreport)
pio
Lorenzo Ferretti
Edge-Disjoint Path Problem on Stochastic Block Models through Message Passing
Sapienza Università di Roma, 2020 (mastersthesis)

pf
Baldauf, A.
Colloidal particles supporting urase activity
Univ. of Stuttgart, 2020 (mastersthesis)

pf
Bochert, I.
Diffusion studies on biomolecules by NMR
Univ. of Stuttgart, 2020 (mastersthesis)
2019
ei
Safavi, S., Logothetis, N., Besserve, M.
Multivariate coupling estimation between continuous signals and point processes
Neural Information Processing Systems 2019 - Workshop on Learning with Temporal Point Processes, December 2019 (talk)
pio
Emanuele Pigani
Analysis and modelling of information ecosystems
Università degli studi di Padova, October 2019 (mastersthesis)
ei
Stimper, V.
Inferring the Band Structure from Band Mapping Data through Machine Learning
Technical University of Munich, September 2019 (mastersthesis)
pio
Contisciani, M.
A new approach for community detection in multilayer networks
Università degli studi di Padova, September 2019 (mastersthesis)
ei
Dietz, B.
Learning to Diagnose Diabetes from Magnetic Resonance Tomography
ETH Zurich, Switzerland, August 2019 (mastersthesis)
ei
Li, G.
Reinforcement Learning for a Two-Robot Table Tennis Simulation
RWTH Aachen University, Germany, July 2019 (mastersthesis)
ei
Konieczny, L.
Characteristics of longitudinal physiological measurements of late-stage ALS patients
Ludwig-Maximilians-Universität München, Germany, May 2019 (mastersthesis)
mms
Bihler, M.
X-ray microscopic characterization of high-Tc-supercoductors using image processing
Universität Stuttgart, Stuttgart, 2019 (mastersthesis)

pf
Kottapalli, S. N. M.
Active matter and self propelled microparticles
Univ. of Stuttgart, 2019 (mastersthesis)